


基于数字孪生的高速公路仿真系统
发布日期:2023-03-07 浏览量:1
字号:大 中 小
【成果简介】
基于数字孪生的高速公路仿真系统由电子科技大学网络空间安全实验室自主开发,核心技术源自实验室近10年在国家自然科学基金等国家和省部级科研成果,同时吸收了国内外交通仿真领域的最新成果,具有多源数据融合、在线仿真、高真实度、多维可视化
等特色。
【主要功能及性能】
主要性能:基于数字孪生的高速公路仿真系统支持天气、仿真路网、仿真车辆模型、交通流配置等交通参数配置,可开展交通路网实时数据的感知、传输、融合处理、综合分析,以及交通实时态势的分析和研判。
主要功能:
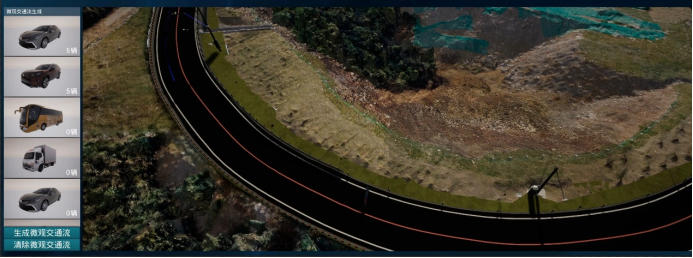
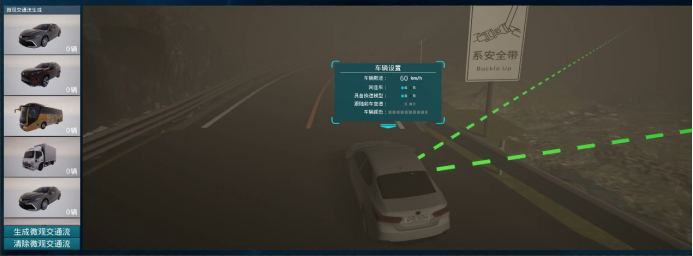
1.支持复杂环境道路的模拟,引入了建筑位置分布数据、道路气象信息等其他复杂物理环境因素,如不利天气下路段的通行能力将有所下降等情况,更加适用于真实物理环境条件下的道路交通仿真,也使得交通仿真过程和结果更接近现实。

2.支持微观交通流的生成与配置,包括小型轿车、中型汽车、大型货车等类型与数量,满足实际混合交通场景构建的需求,能够帮助交通管理部门更好地评价和调整道路交通控制方案。
3.支持适用于数字孪生的仿真车辆行为模型,通过分析混合交通流环境的车辆行为特征,优化现有的车辆运行模拟模型,实现更具包容性的汽车跟驰和车道变换模型,并基于历史数据和收集的数据进行模型参数拟合和迭代优化系统实现了全场景全周期的高速公路交通全景图,针对道路交通多源数据进行时空同步及数据标准化,实现全方位全覆盖前端感知系统,针对道路进行静态建模以及动态演化模拟,构建了数字孪生体中“环境”、“路”、“车”等要素相互映射、适时交互、高效协同的复杂系统,最终对交通参与者进行信息反馈和行为分析。

【应用情况】
本成果已应用于蜀道集团龙池高速公路实验段的车路协同辅助驾驶;
能够弥补高速公路运营对交通运行数据、交通事件等信息获取及发布的全面性、准确性、时效性等方面存在的不足;
使得整个交通系统成为一个高效、协调和优化运行的整体。